LoRaチュートリアル(2)プログラムで送受信
今回やること
前回は手動で設定を行い、データを送受信しましたが、今回はプログラムで自動化したいと思います。
まずは、送信側から自動化します。
送信側をプログラムで動かす
前回は、ArduinoのTX、RXピンを使ったハードウェアシリアルでES920LRとやり取りをおこなっていましたが
このピンは、シリアルモニターで使用されているピンと共通であるため、今後少しデバッグしにくくなるため今回はソフトウェアシリアルを使用します。
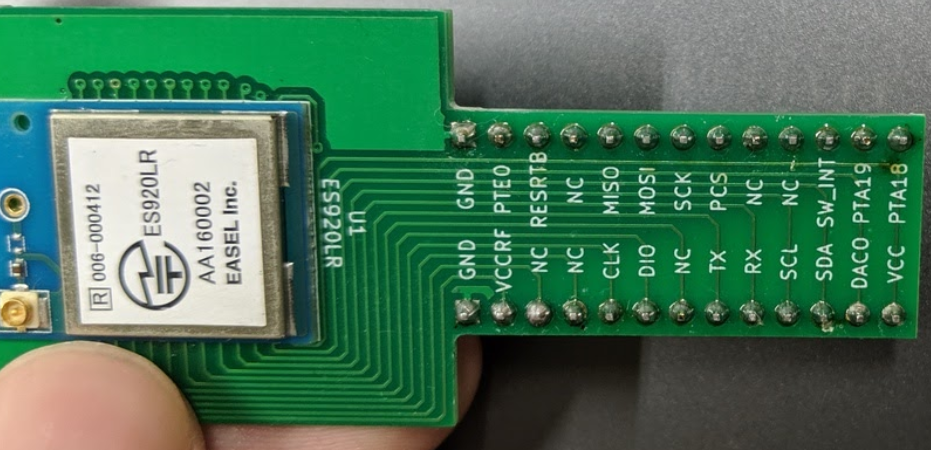
配線
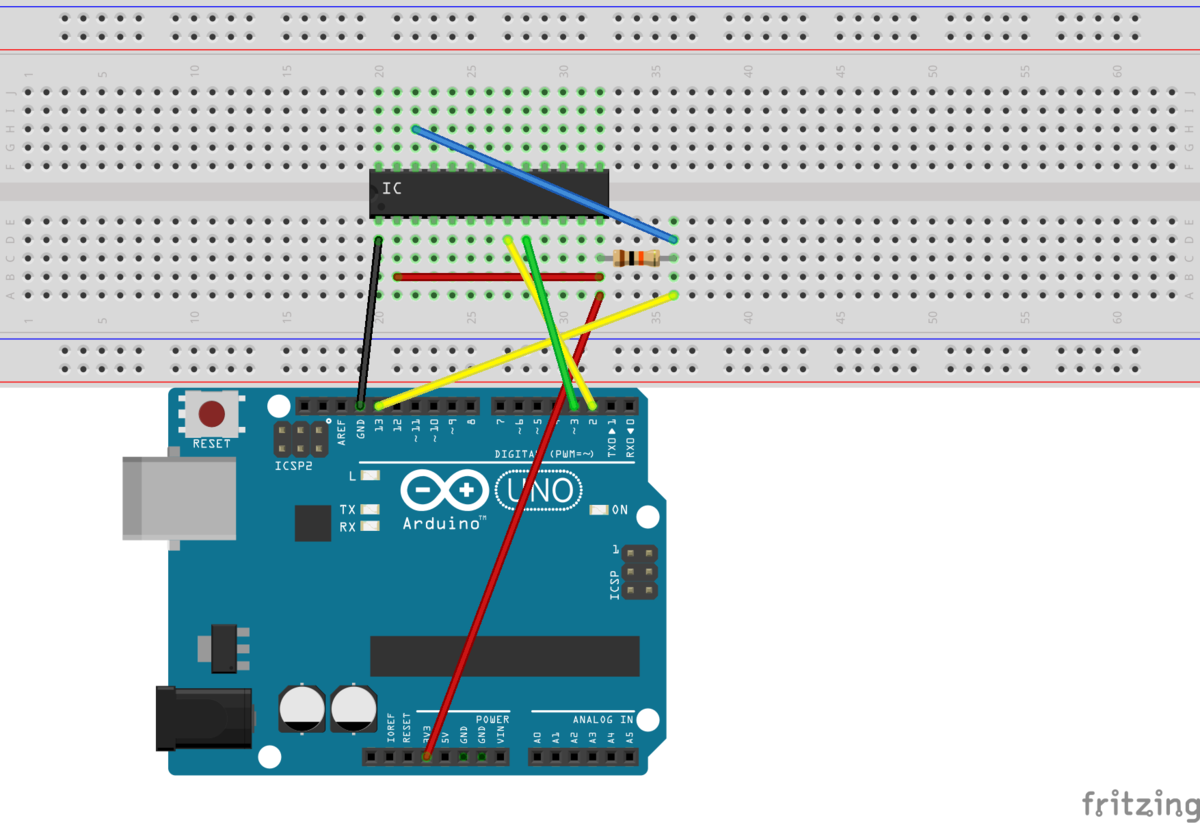
ES920LRのピン配置はこんな感じです。上のICチップの部分と置き換えて配線してください。
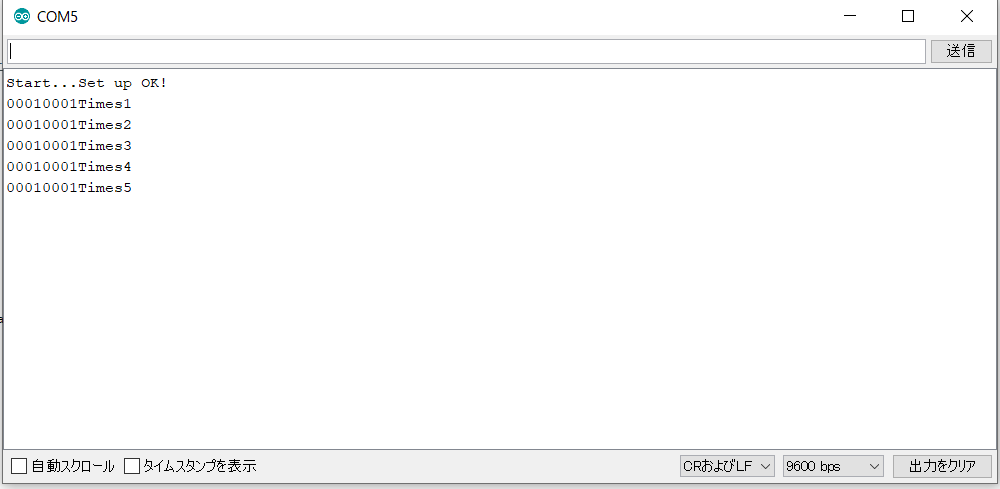
送信プログラム
配線が終わったらプログラムを書き込みます。
リセットピンを使ってLoRaを再起動させているので、前回のように3.3Vを抜き差ししてLoRaを再起動させる必要はありません。
#include <SoftwareSerial.h> #define LORA_RECV_RecvData 100 #define ES920LR_RST_PIN 13 #define LORA_RX 2 #define LORA_TX 3 String dstId = "00010001"; /*送信相手の番号*/ const int maxSendTimes = 10; /*最大送信回数*/ const int setCmdDelay = 100; /*待機時間*/ SoftwareSerial LoRa_Serial(LORA_RX, LORA_TX); void setup() { pinMode(ES920LR_RST_PIN, OUTPUT); // LoRaを再起動させる digitalWrite(ES920LR_RST_PIN, LOW); delay(100); digitalWrite(ES920LR_RST_PIN, HIGH); delay(1500); Serial.begin(9600); LoRa_Serial.begin(9600); loraInit(); String sendData = ""; for (int i = 1; i <= maxSendTimes; i++) { sendData = dstId + "Times" + i; delay(2000); Serial.println(sendData); LoRa_Serial.println(sendData); while (LoRa_Serial.available() > 0) LoRa_Serial.read(); delay(4000); } } void loop() { } void loraInit() { Serial.print("Start..."); // コマンドモード開始 LoRa_Serial.println("2"); clearBuffer(); // bw(帯域幅の設定) LoRa_Serial.println("bw 4"); clearBuffer(); // sf(拡散率の設定) LoRa_Serial.println("sf 12"); clearBuffer(); LoRa_Serial.println("channel 1"); clearBuffer(); // 自分が参加するPANネットワークアドレスの設定 LoRa_Serial.println("panid 0001"); clearBuffer(); // 自分のノードIDを設定 LoRa_Serial.println("ownid 0002"); clearBuffer(); // ack受信の設定 LoRa_Serial.println("ack 2"); clearBuffer(); //送信元のID付与設定 LoRa_Serial.println("o 1"); clearBuffer(); // RRSIの付与設定 LoRa_Serial.println("p 2"); clearBuffer(); // 送信モードを設定 LoRa_Serial.println("n 2"); clearBuffer(); // 設定を保存する LoRa_Serial.println("w"); clearBuffer(); // 通信の開始 LoRa_Serial.println("z"); clearBuffer(); Serial.println("Set up OK!"); } void clearBuffer() { delay(setCmdDelay); while (LoRa_Serial.available() > 0) LoRa_Serial.read(); }
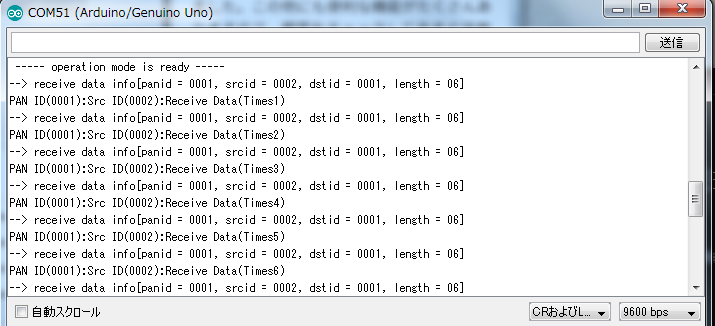
動作確認
受信側は、前回と同じ方法で受信できる状態にしておきます。
受信側をプログラム で動かす
配線
配線は送信側と同じです。
受信プログラム
前回の設定では、送信側のノードIDも付与されます。
今回は、送信側のノードIDは必要ないのでloraInit関数の送信元のID付与設定で付与されないように設定します。
#include <SoftwareSerial.h> #include <stdlib.h> #define RECV_SIZE 30 #define ES920LR_RST_PIN 13 #define LORA_RX 2 #define LORA_TX 3 String dstId = "00010001"; /*送信相手の番号*/ const int maxSendTimes = 10; /*最大送信回数*/ const int setCmdDelay = 100; /*待機時間*/ SoftwareSerial LoRa_Serial(LORA_RX, LORA_TX); void setup() { pinMode(ES920LR_RST_PIN, OUTPUT); // LoRaを再起動させる digitalWrite(ES920LR_RST_PIN, LOW); delay(100); digitalWrite(ES920LR_RST_PIN, HIGH); delay(1500); Serial.begin(9600); LoRa_Serial.begin(9600); delay(3500); loraInit(); Serial.println("Start Recv"); } void loop() { char RecvData[RECV_SIZE] = ""; unsigned char n = 0; while (LoRa_Serial.available() > 0) { // バッファから一文字取り出す RecvData[n] = LoRa_Serial.read(); // 改行文字が来たらNULL文字にする if (RecvData[n] == '\r' || RecvData[n] == '\n') { RecvData[n] = '\0'; clearBuffer(); Serial.println(RecvData); break; } if (n < RECV_SIZE) { n++; } else { n = 0; } } delay(300); } void loraInit() { Serial.print("Start..."); // コマンドモード開始 LoRa_Serial.println("2"); clearBuffer(); // bw(帯域幅の設定) LoRa_Serial.println("bw 4"); clearBuffer(); // sf(拡散率の設定) LoRa_Serial.println("sf 12"); clearBuffer(); LoRa_Serial.println("channel 1"); clearBuffer(); // 自分が参加するPANネットワークアドレスの設定 LoRa_Serial.println("panid 0001"); clearBuffer(); // 自分のノードIDを設定 LoRa_Serial.println("ownid 0002"); clearBuffer(); // ack受信の設定 LoRa_Serial.println("ack 2"); clearBuffer(); //送信元のID付与設定 LoRa_Serial.println("o 2"); clearBuffer(); // RRSIの付与設定 LoRa_Serial.println("p 2"); clearBuffer(); // 送信モードを設定 LoRa_Serial.println("n 2"); clearBuffer(); // 設定を保存する LoRa_Serial.println("w"); clearBuffer(); // 通信の開始 LoRa_Serial.println("z"); clearBuffer(); Serial.println("Set up OK!"); } void clearBuffer() { delay(setCmdDelay); while (LoRa_Serial.available() > 0) LoRa_Serial.read(); }
